02. Hosyond 4WD Smart Robot Car Kit · MASTER v2.7
Ολοκληρωμένο εκπαιδευτικό project για Arduino 4WD robot car με state-machine λογική, τρία βασικά modes λειτουργίας και ενισχυμένο obstacle avoidance με fail-safe μηχανισμούς.
Περιγραφή
Το project έχει σχεδιαστεί για σχολικά εργαστήρια ρομποτικής και μαθήματα τεχνολογίας, με έμφαση στη σταθερή και προβλέψιμη συμπεριφορά μέσα στην τάξη.
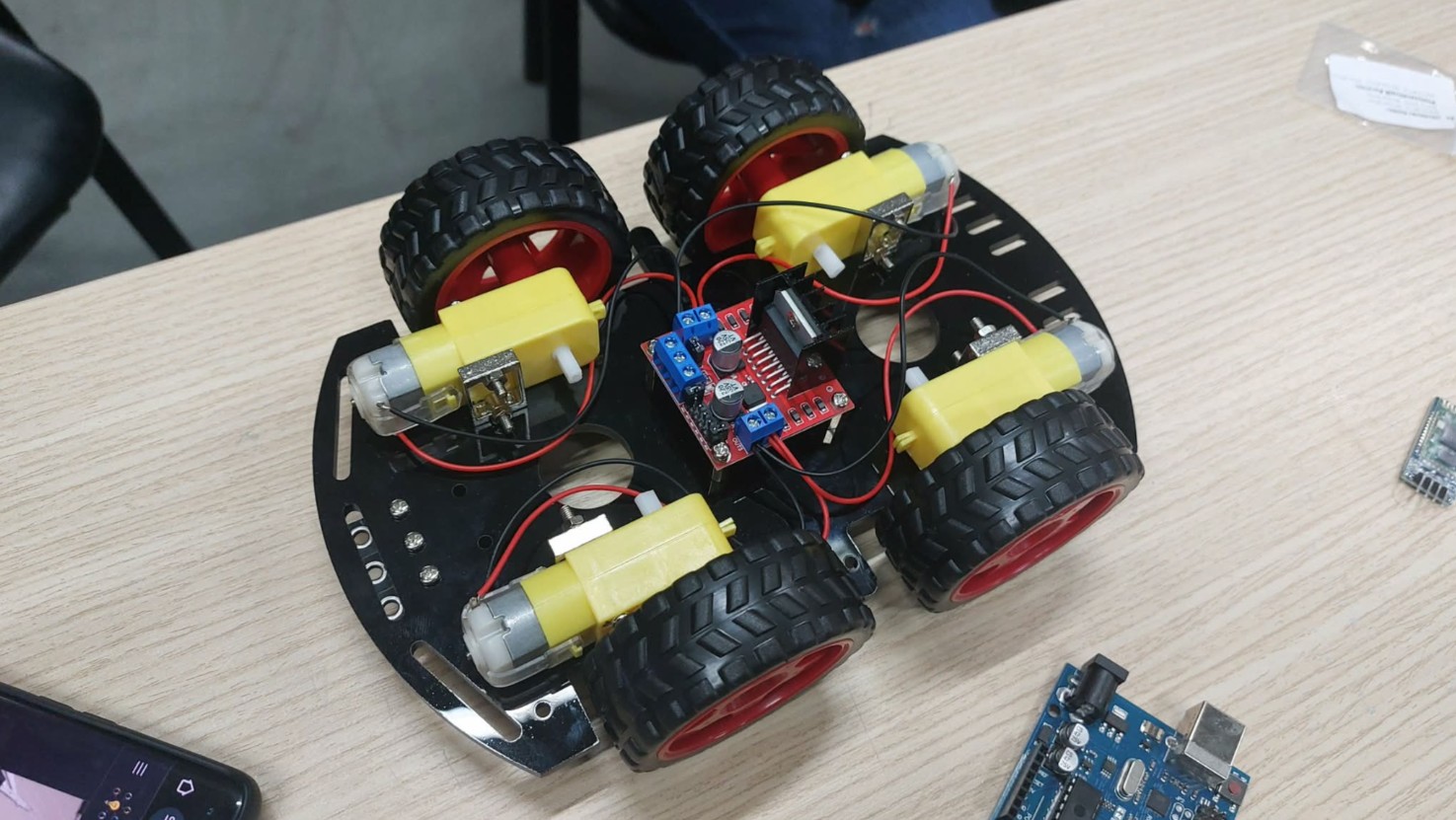
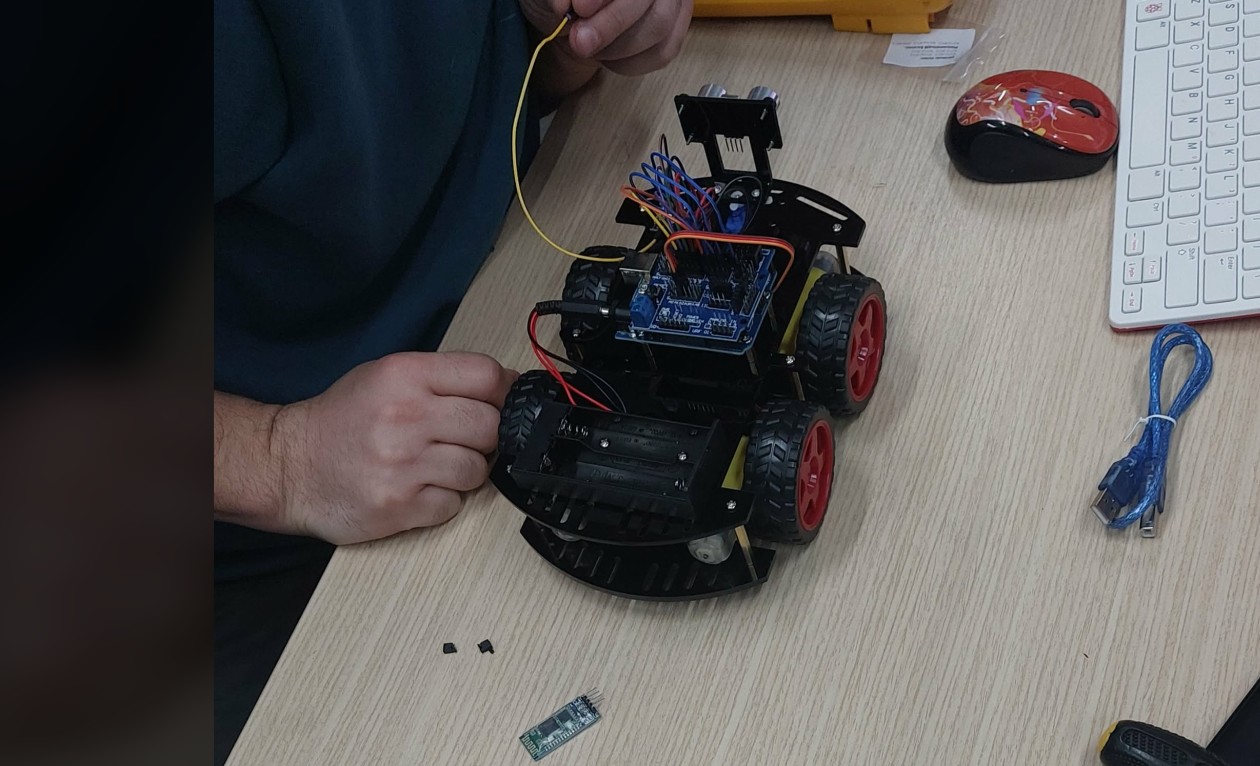
Ολοκλήρωση της κατασκευής στον Σύλλογο Τεχνολογίας Θράκης
Ομάδα Κατασκευής: Κώστας Λ., Γιάννης Γ., Άρης Τ., Δημήτρης Κ.
Α. Modes λειτουργίας
- MANUAL — IR Remote, Bluetooth, Serial
- LINE TRACKING — 3 αισθητήρες γραμμής
- OBSTACLE AVOIDANCE — Ultrasonic + Servo
Τι προσθέτει η v2.7
- Full scan 180° με servo
- Valley detection για ασφαλέστερη επιλογή διαδρομής
- Βαθμολόγηση ανοιγμάτων με βάση πλάτος, βάθος και γωνία
- Anti-stuck λογική με
consecutiveTurnsκαιoscillationCount - Κατάσταση
STRESSόταν δεν υπάρχει ασφαλές άνοιγμα
Β. Παιδαγωγική αξία
- State machine αρχιτεκτονική
- Non-blocking προγραμματισμός
- Συνδυασμός πολλαπλών αισθητήρων
- Αυτόνομη λήψη αποφάσεων
- Εισαγωγή σε fail-safe σχεδίαση
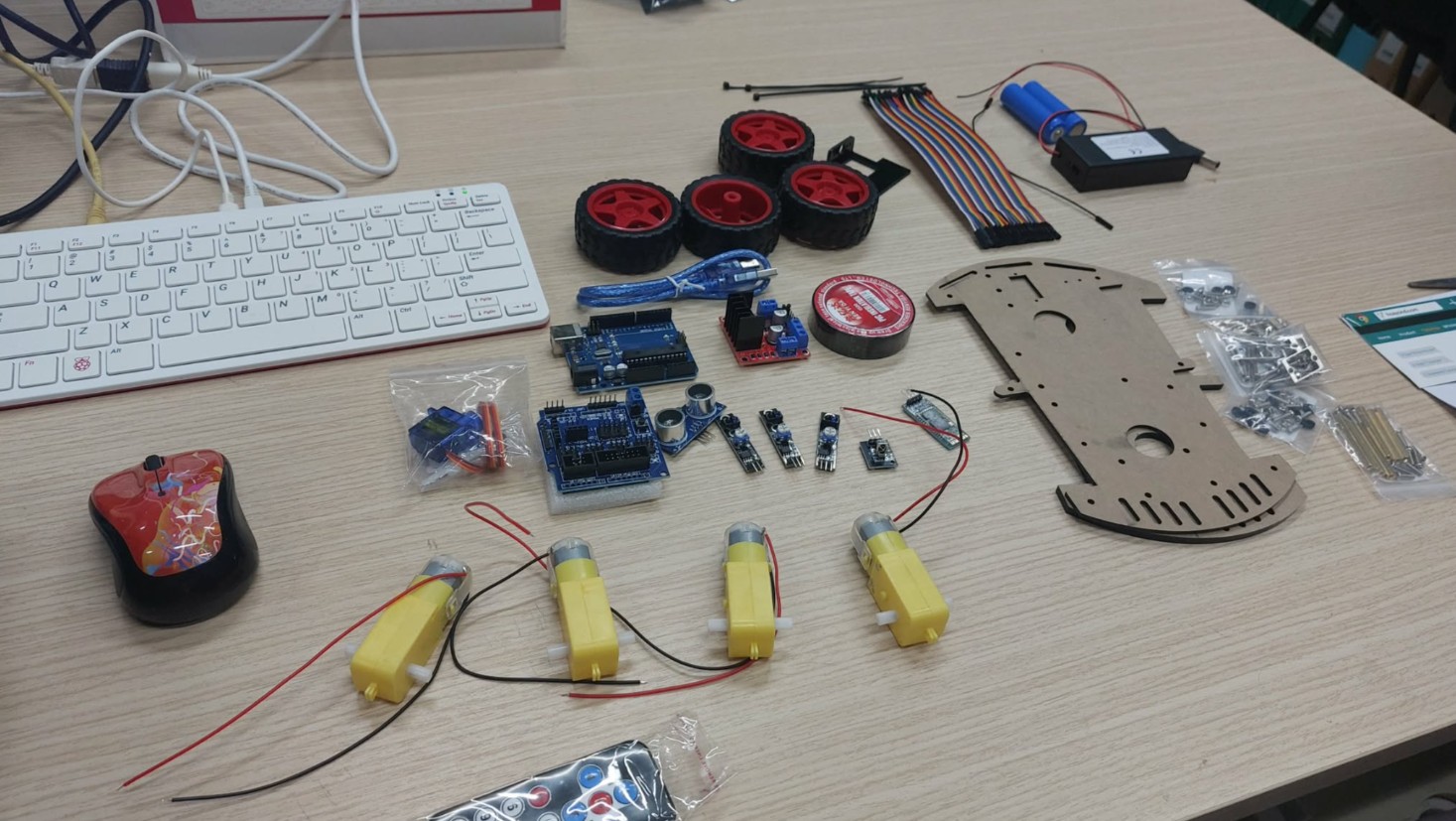
Γ. Υλικά
- Arduino UNO ή συμβατό
- L298N Motor Driver
- 3 αισθητήρες γραμμής
- HC-SR04 ultrasonic sensor
- Servo SG90
- IR receiver + remote
- Bluetooth HC-05 / HC-06
Δ. Βασικό pinout
- L298N: D2, D4, D5, D6, D7, D8
- Line sensors: D9, D10, D11
- Servo: D3
- Ultrasonic: A0, A1
- IR receiver: D12
- Bluetooth: A2, A3
Σημειώσεις χρήσης
- Το BT RX χρειάζεται διαιρέτη τάσης
- Κατά το upload αφαιρούμε προσωρινά το Bluetooth module
- Προτείνεται ξεχωριστή σταθερή 5V τροφοδοσία για το servo
- Όλα τα GND πρέπει να είναι κοινά